Controller Navigation System
Robotics and Space Exploration (RoSE)
At the beginning of my Fall 2023 semester, I decided to make a large change in my life and start taking my education and career more seriously. Maybe it was a random strike of motivation, or maybe it was the fearmongering of tech-bros online who claim that the software development industry is not growing and finding a job will be extremely hard without a solid background resume. Either way, I made it my goal to join at least one extracurricular group or club to help expand my knowledge and experience in the field and one of these groups that I decided on was the Robotics and Space Exploration team at UH Manoa.
RoSE is mostly infamous in the engineering department, as those students collaborating for part of a project for a few semesters is a requirement to graduate, but despite being made up of mostly engineers, the team needs a coding and software-focused team to control and allow the robot to complete its necessary tasks. I joined as part of the Guidance and Navigation Control team, or GNC, and started working on developing a navigation system on the ground station website that uses a controller instead of the previously used keyboard.
The Project Itself
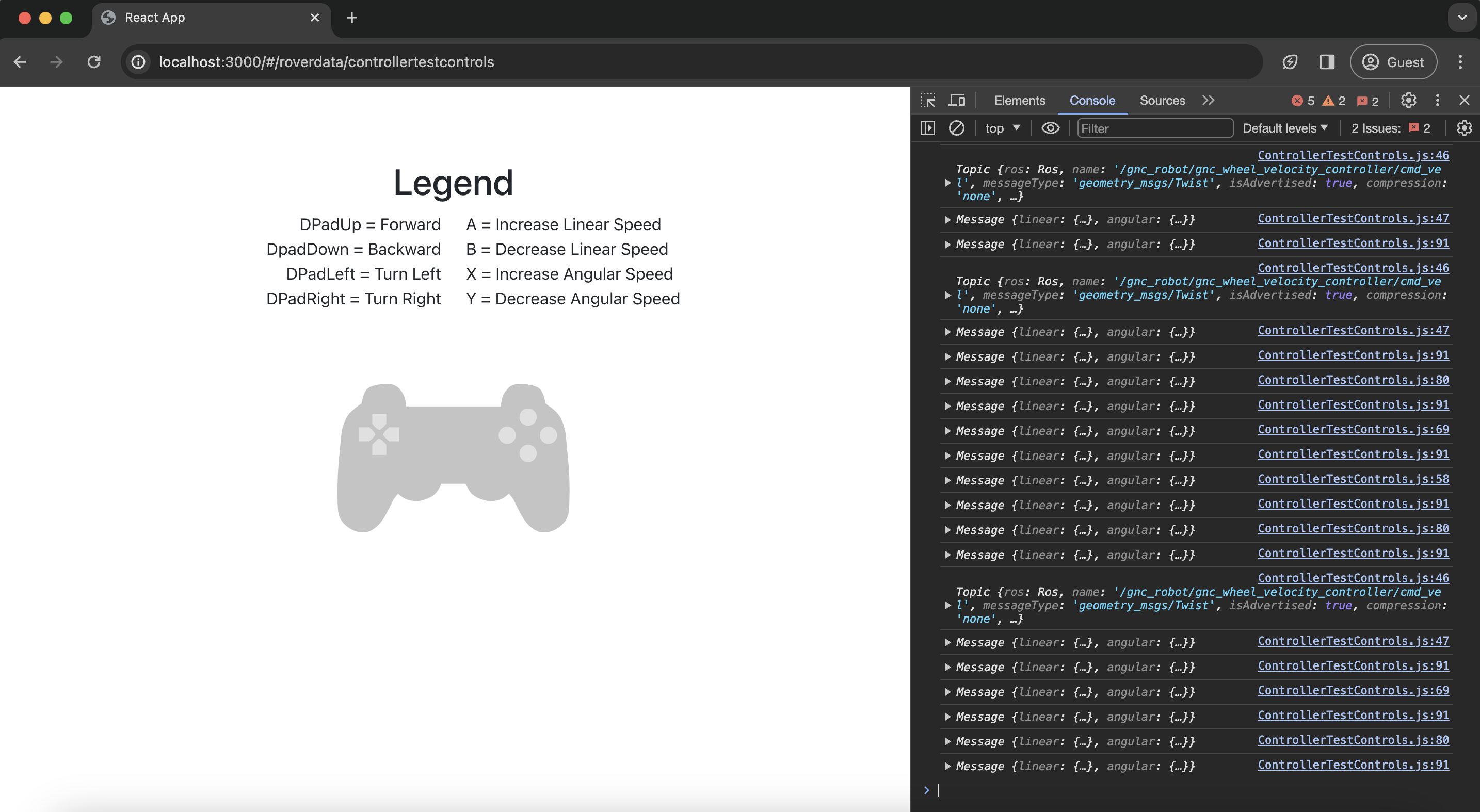
The controller navigation system is a webpage I created that translates input from the controller into movement commands sent to the robot we are using.
This website was mostly implemented through the React framework and written using Javascript for the commands, both of which I gained much experience in through self-teaching methods to catch up to the rest of the team.
Most of the communications through this webpage made to the robot itself are done through the middleware ROS, which is meant to integrate the mechanical controls of the robot with the instructions sent to it through a ground control center built with software.
I also began my very first experiences with Github and IntelliJ IDEA through this team, and have become competent with their use in projects and working with others.
Here is some example code to illustrate the controller’s use and how it communicates to the robot through ROS:
/////////////////////////
// Movement control
/////////////////////////
function forward() {
message = new window.ROSLIB.Message({
linear: { x: linSpeed, y: 0, z: 0, },
angular: { x: 0, y: 0, z: 0, },
})
console.log(cmd_vel);
console.log(message);
//Call velocity topic from ROS connection
cmd_vel.publish(message);
};
function backward() {
message = new window.ROSLIB.Message({
linear: { x: -linSpeed, y: 0, z: 0, },
angular: { x: 0, y: 0, z: 0, },
})
console.log(message);
//Call velocity topic from ROS connection
cmd_vel.publish(message);
};
function turnLeft() {
message = new window.ROSLIB.Message({
linear: { x: 0.0, y: 0, z: 0, },
angular: { x: 0, y: 0, z: angSpeed, },
})
console.log(message);
//Call velocity topic from ROS connection
cmd_vel.publish(message);
};
function turnRight() {
message = new window.ROSLIB.Message({
linear: { x: 0.0, y: 0, z: 0, },
angular: { x: 0, y: 0, z: -angSpeed, },
})
console.log(message);
//Call velocity topic from ROS connection
cmd_vel.publish(message);
};
function stop() {
message = new window.ROSLIB.Message({
linear: { x: 0, y: 0, z: 0, },
angular: { x: 0, y: 0, z: 0, },
})
console.log(message);
//Call velocity topic from ROS connection
cmd_vel.publish(message);
};
///////////////////////////
// Speed control
///////////////////////////
function incLinSpeed() {
linSpeed *= 1.1;
console.log(linSpeed);
};
function decLinSpeed() {
linSpeed *= 0.9;
console.log(linSpeed);
};
function incAngSpeed() {
angSpeed *= 1.1;
console.log(angSpeed);
};
function decAngSpeed() {
angSpeed *= 0.9;
console.log(angSpeed);
};
///////////////////////////
// Controller Listener
///////////////////////////
function onButtonPress(e) {
const { buttonName } = e.detail;
switch(buttonName) {
case 'button_12': //dPadUp move forward
forward();
setDPadUp(true);
break;
case 'button_13': //dPadDown move backward
backward();
setDPadDown(true);
break;
case 'button_14': //dPadLeft turn left
turnLeft();
setDPadLeft(true);
break;
case 'button_15': //dPadRight turn right
turnRight();
setDPadRight(true);
break;
case 'button_0': //aButton inc lin speed
incLinSpeed();
setButtonA(true);
break;
case 'button_1': //bButton dec lin speed
decLinSpeed();
setButtonB(true);
break;
case 'button_2': //xButton inc ang speed
incAngSpeed();
setButtonX(true);
break;
case 'button_3': //yButton dec ang speed
decAngSpeed();
setButtonY(true);
break;
default:
setDPadUp(false)
setDPadDown(false)
setDPadLeft(false)
setDPadRight(false)
setButtonA(false)
setButtonB(false)
setButtonX(false)
setButtonY(false)
break;
}
e.stopImmediatePropagation();
}
function onButtonRelease (e) {
const { buttonName } = e.detail;
switch(buttonName) {
case 'button_12': //dPadUp
setDPadUp(false);
break;
case 'button_13': //dPadDown
setDPadDown(false);
break;
case 'button_14': //dPadLeft
setDPadLeft(false);
break;
case 'button_15': //dPadRight
setDPadRight(false);
break;
case 'button_0': //aButton
setButtonA(false);
break;
case 'button_1': //bButton
setButtonB(false);
break;
case 'button_2': //xButton
setButtonX(false);
break;
case 'button_3': //yButton
setButtonY(false);
break;
default:
setDPadUp(false)
setDPadDown(false)
setDPadLeft(false)
setDPadRight(false)
setButtonA(false)
setButtonB(false)
setButtonX(false)
setButtonY(false)
break;
}
stop();
e.stopImmediatePropagation();
}
While this is a very elementary implementation of the use of a controller to send ROS messages to the robot, it significantly improved upon the keyboard control system that was in use prior by having a more controlled regulation of ROS messages sent through the program.
My Overall Experience
So far, I’ve really enjoyed being a part of this team and contributing to this project even if it is a lot of voluntary work on top of my already difficult course loads. Teaching myself Javascript, HTML/CSS, and the React framework all within the span of a few weeks just to be immediately assigned a job working directly with the control station was very stressful, but now going into my Spring 2023 semester at UH Manoa, I feel much more confident with my development of this project and have already begun to make several more improvements on top of what I have already done.
My goal by the end of my time at RoSE is to have multiple well-developed smaller projects under my belt and get at least a couple of years of experience working with a team of developers on a large-scale project such as this. Hopefully, these experiences will help to make me a better software developer and assist my in my future endeavors in the field.